山岳トンネル工事では、掘削の最前線となる「切羽(きりは)」と呼ばれる場所で、安全確認が大きな課題となっています。発破作業の直後は、岩盤の崩落や有害ガスの発生リスクもあり、作業員が立ち入る前の確認には常に危険が伴います。
そうした中、四足歩行ロボットを活用し、人が入る前に危険エリアの状況を確認する実証が進められています。今回注目を集めたのは、山岳トンネルの実際の建設現場において、ロボットによる無人探査やガス監視、3Dデータ取得などを行った取り組みです。
ロボットに搭載されたセンサーによってガス濃度を遠隔で確認したり、LiDARによってトンネル内部を3Dデータ化したりするなど、IoT技術を活用した施工管理のデジタル化も進みつつあります。
建設現場における人手不足や安全対策が課題となる中、こうした技術が今後どのように活用されていくのか気になるところです。
山岳トンネル工事の「切羽」とは? なぜ無人化が注目されているのか
山岳トンネル工事では、「切羽(きりは)」と呼ばれる掘削の最前線エリアが重要な作業場所となります。トンネルを掘り進めるうえで避けて通れない場所ですが、その一方で、現場の中でも特に危険性が高いエリアとして知られています。
特に発破作業の直後は、岩盤が不安定になっている場合があり、落石や崩落、有害ガスの発生などに注意が必要です。そのため、作業員が安全に入れる状態かどうかを確認する工程は、施工管理において非常に重要な役割を担っています。
こうした背景から近年は、人が直接危険エリアへ立ち入るのではなく、ロボットやセンサーを活用して安全確認を行う取り組みに注目が集まっています。
今回の実証では、四足歩行ロボットを活用し、人が現場へ立ち入る前に切羽周辺の状況確認を行う検証が進められました。複雑な地形でも移動できるロボットを活用することで、建設現場における安全対策や省人化につながる可能性も期待されています。
四足歩行ロボットとIoTセンサーで危険エリアを無人探査

今回の実証で活用されたのは、四足歩行ロボット「Unitree B2-W」です。犬のような形状をしたロボットで、段差や凹凸の多い不整地でも移動しやすい特徴を持っています。
山岳トンネルの切羽周辺は、舗装された場所とは異なり、岩や泥などが入り混じる複雑な環境となっています。今回の検証では、そうした現場においてロボットが自律走行や遠隔操作によって進入し、危険エリアの確認を行いました。
また、ロボットにはガス検知センサーも搭載されており、酸素濃度や可燃性ガス、有毒ガスの有無などを遠隔で確認できる仕組みも導入されています。
これまで人が直接確認していた作業を、ロボットとIoTセンサーを組み合わせて行うことで、安全確認のデジタル化が進みつつある点も今回のポイントと言えそうです。
建設業界では人手不足や安全管理の負担が課題となる中、こうした無人探査技術は、今後さらに導入が進んでいくかもしれません。
LiDARによる3Dデータ取得で施工管理のデジタル化も進む
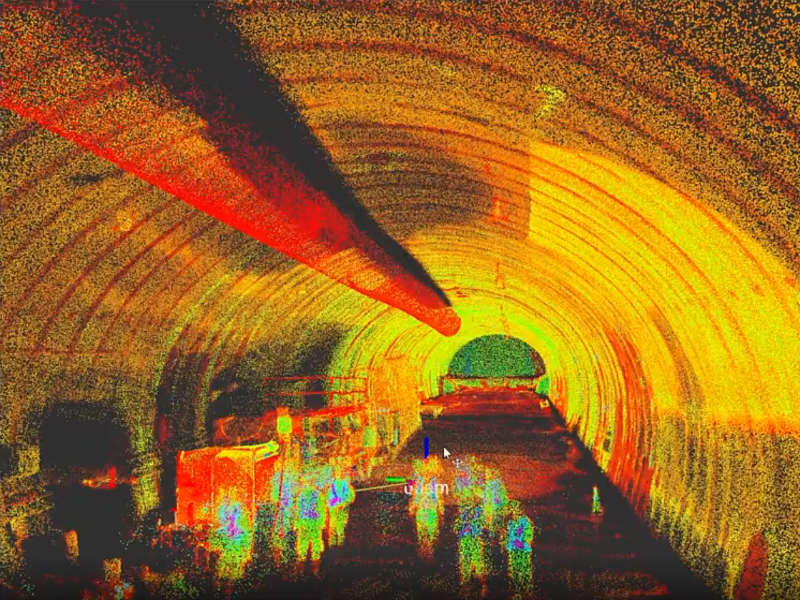
今回の実証では、危険エリアの確認だけでなく、LiDAR(ライダー)を活用した3Dデータ取得も行われました。
LiDARはレーザーを照射し、対象物までの距離や形状を計測する技術です。自動運転や測量分野などでも活用が進んでおり、近年は建設現場での導入も増えています。
今回の検証では、トンネル内部や切羽周辺の形状を3D点群データとして取得し、施工管理へ活用できるかが確認されました。点群データを活用することで、現場の形状変化や掘削状況をデジタル上で把握しやすくなります。
さらに、取得したデータはBIM/CIMモデルとの連携も想定されており、施工状況の可視化や管理効率向上につながる可能性もあるようです。
ロボットによる無人探査だけでなく、取得したデータを施工管理へ活用していく流れも、今回の取り組みにおける大きなポイントのひとつと言えそうです。
建設現場で進むIoT活用 今後は長時間運用や自動分析も課題に

今回の検証では、実際の建設現場でロボットによる無人探査やデータ取得が行われましたが、一方で今後の実用化に向けた課題も見えてきたようです。
例えば、山岳トンネルの切羽周辺は地形が非常に複雑で、崩落後の不安定な足場などにも対応する必要があります。そのため、より過酷な環境でも安定して移動できる性能向上が求められています。
また、広い現場で継続的に活用するには、長時間稼働や通信の安定性も重要になります。ロボットが長距離を自律的に巡回しながら、リアルタイムでデータを送信できる環境整備も今後のテーマとなりそうです。
さらに、取得した3Dデータをもとに施工進捗を自動分析する仕組みなども検討されており、IoTやデータ活用による施工管理の効率化は今後さらに進んでいく可能性があります。
建設現場では、安全対策だけでなく人手不足への対応も大きな課題となっています。こうしたロボットやIoT技術の活用は、今後の建設業界における働き方にも変化を与えていくかもしれません。
危険エリアを人ではなくロボットが確認する時代へ
山岳トンネル工事は、建設現場の中でも特に危険を伴う作業のひとつとされています。特に切羽周辺では、崩落や有害ガスなどのリスクがある中で安全確認を行う必要があり、現場の負担も小さくありません。
今回の実証では、四足歩行ロボットとIoTセンサー、LiDARによる3Dデータ取得を組み合わせることで、人が立ち入る前に危険エリアの状況を把握する取り組みが進められました。
建設業界では、人手不足や高齢化への対応に加え、安全性向上や施工管理の効率化も求められています。そうした中で、ロボットとデータ活用を組み合わせた施工管理は、今後さらに広がっていく可能性がありそうです。
これまで人が担っていた危険確認をロボットが代替し、人はより安全な場所で判断や管理を行う――。そんな建設現場の変化が、少しずつ現実になり始めているのかもしれません。