東京駅の構内を、四本足で歩くロボットが静かに巡回している――。そんな未来的な光景が、いよいよ現実のものになりつつあります。駅という膨大な空間では、点検作業の細かさと正確さが求められますが、人だけでカバーするには限界がある場面も少なくありません。そうした課題に向き合う新しい取り組みとして、四足歩行ロボットを使った設備点検の実証実験が始まりました。
今回のロボットは、カメラや3Dセンサーを搭載し、あらかじめ設定されたルートを自律的に歩行します。通路の状況や設備の状態を正確に記録できる点が特徴で、これまでの“人の目”だけでは捉えきれなかった微細な変化に気付ける可能性もあると感じました。広い駅構内でも安定して動けるつくりになっているため、日々の点検業務のあり方が大きく変わるかもしれません。
また、人が行う点検はどうしても経験や視点の違いでばらつきが出てしまいますが、ロボットであれば同じ品質でデータを蓄積できます。安全性の確保と効率化を同時に進めたい現場では、これまでにない強力なパートナーになり得る印象があります。
駅のインフラ点検という生活に直結する分野で、ロボットがどこまで力を発揮できるのか。未来を先取りするようなこの取り組みには、私たちの身近な社会が少しずつ変わっていく気配があります。
四足歩行ロボットが駅点検と相性が良い理由

駅の安全を支える点検作業は、見た目以上に多くの工程があり、わずかな変化も見逃さない細やかさが求められます。東京駅のような巨大な駅では、日々の利用者数が多いこともあり、設備の状態を安定して把握することがとても重要です。こうした現場において新たに注目されているのが、四足歩行ロボットを活用した巡回点検です。
今回使用されているロボットは、四本の脚で移動する機構と、周囲を立体的に把握できる3Dセンサーやカメラを備えており、決められたルートを自律的に歩行できます。駅の床面は急激な形状変化が少なく、上下の高低差が比較的明確なため、四足歩行ロボットの動作が安定しやすい環境といえます。また、駅構造が大きく変化しないという点も、巡回ルートの記憶や自律歩行との相性の良さにつながっています。
さらに、人だけで行う点検は、経験や知識の差によって見え方や判断が変わることがありますが、ロボットであれば同じルートを同じ条件で巡回できるため、情報のばらつきが起きにくくなります。人の目で行ってきた点検に対し、「安定した記録を残す」という新しい価値を加えられる点は、大規模な駅ならではの課題に合ったアプローチだと感じます。
こうした理由から、四足歩行ロボットは駅点検との相性が良く、導入が進められているのだと分かります。
ロボットによる点検は何を変えるのか

四足歩行ロボットが担う点検は、人が行う巡回とは少し性質が異なります。ロボットは自由に歩き回れるわけではないため、まず点検ルートを事前に登録し、その道筋に沿って自律的に移動します。この仕組みによって、毎回まったく同じ経路を同じ条件で巡回でき、取得されるデータの精度と均一性が保たれます。
ロボットにはカメラや3D LiDARが搭載されており、移動しながら通路の状態や設備の配置を立体的に記録します。こうしたセンサーによるデータ取得は、人の視認だけでは気付きにくい微細な変化を把握できる可能性があります。特に駅のように利用者が多く、設備の数も膨大な環境では、記録を積み重ねることで設備の変化を早期に知る手がかりにもなります。
また、ロボットは疲れることなく同じ品質で歩き続けられるため、「経験による差が出にくい」という利点もあります。点検業務は担当者によって判断が異なったり、長時間作業による注意力の低下が課題になることがありますが、ロボットであればその部分を補う存在として活躍できます。もちろん人の判断が不要になるわけではありませんが、安定したデータを蓄積できる点は大きな価値に感じます。
点検の質を一定に保ちつつ、より細かな情報を継続して収集する。この組み合わせが、ロボットが点検業務にもたらす新しい変化だといえます。
遠隔操作と360°視点が広げる新しい可能性
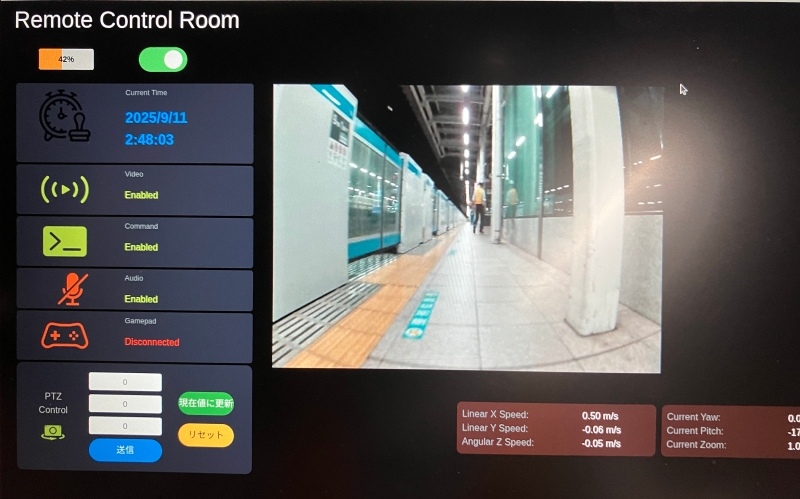
四足歩行ロボットの実証では、自律歩行だけでなく、遠隔で操作できる仕組みも活用されています。専用の画面にはロボットのカメラ映像が表示され、周囲の状況や通路の状態を確認しながら操作できるようになっています。こうした仕組みは、障害物がある場所や複雑なエリアを調べる際に役立ち、現場に直接入らずとも安全に点検作業を進められる点が特徴です。
さらに、ロボットには360°カメラが搭載されており、周囲を一度に見渡せる映像を取得できます。人がその場に立ったときの視界を再現するような感覚で状況を確認できるため、後から見返した際にも細かなチェックがしやすくなります。広い駅構内では、全方向を同じ精度で記録し続けることは難しいため、こうした機能の存在は大きな意味を持つと考えられます。
従来の点検業務は、担当者が現場を歩きながら確認するのが基本ですが、ロボットが取得した詳細な映像や立体データを組み合わせれば、これまでとは異なる視点で設備を把握できる可能性があります。実際の作業をそのまま置き換えるというよりも、「新しい情報の集め方を加える」という位置づけが近く、点検そのものの質を高める方向へつながっている印象です。
遠隔操作と360°視点の活用は、ロボットがただ歩き回るだけでなく、より多角的に情報を記録し、現場の安全性を高めるための重要な仕組みだといえます。
なぜ今、この実証が必要とされているのか

駅の設備点検にロボットを導入する背景には、いくつかの大きな課題があります。そのひとつが、点検を担う人材の不足です。駅の安全を維持するための点検作業は細かく、知識や経験が求められますが、担当者が十分に確保できない状況が続くと、作業の負担は大きくなり、業務の持続性にも影響が出てしまいます。
もうひとつの課題は、点検の品質にばらつきが生まれやすいことです。人が行う作業はどうしても個人の経験によって判断が変わることがあり、同じ場所でも見落としや捉え方の違いが出る可能性があります。設備管理の精度を高めるためには、安定した方法で情報を記録し続ける仕組みが必要です。
こうした状況の中で、ロボットの持つ「均質なデータ取得能力」や「繰り返し同じ動作を行える特性」が注目されています。特に駅のような広い施設では、ルートを記憶して確実に巡回できる機能が大きな強みになります。加えて、新しい技術を慎重に扱う傾向のある分野で、早い段階から実証を進める姿勢は、今後の設備管理のあり方を形作っていくうえでも重要な意味を持つと感じます。
ロボットがすべてを担う未来はすぐには来ないかもしれませんが、人とロボットの役割を分けながら効率的に運用していくことで、駅全体の安全性と信頼性を高める動きが着実に進んでいることが分かります。
未来の駅を支える、新しい点検のかたちへ
四足歩行ロボットを活用した今回の実証は、駅という社会インフラに新しい視点をもたらす取り組みだと感じます。従来の点検を置き換えるのではなく、人が担ってきた業務をより正確に、より持続的に行うための選択肢が増えたといえます。積み重ねたデータが活用されれば、設備の変化に早く気付ける可能性も広がり、安全性を高めるうえでも大きな力になりそうです。
公共交通を支える設備は、私たちの生活に密接に関わっています。そうした場所でロボットが働く姿は、未来の駅の姿を少し先取りしているようでもあります。今後、この技術がどのように進化し、どのような形で現場に根付いていくのか。実証が進むことで、私たちの身近な環境に新しい安全管理の仕組みが生まれていくのかもしれません。